
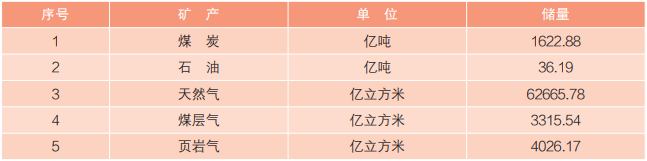
自然资源部晒出我国矿产资源“家底” 矿业绿色发展取得
人民网北京12月3日电 (记者杨曦)矿产资源家底数据是基本国情国力的重要组成部分。近日,自然资源部发布的《中
《科创板日报》8月12日讯(编辑 邱思雨)对人类来说,人形机器人究竟意味着什么?
在“算力教父”黄仁勋看来,随着生成式AI时代来临,未来所有工厂都将变成以软件来定义,且机器人化,它们所造的车也将是机器人。由机器人化设计的机器人,来打造机器人。换言之,社会生产或将高度自动化、智能化,人类将迎来“解放”。
 (相关资料图)
(相关资料图)
人形机器人簇拥者众,越来越多的科技巨头入场角逐。近日,半导体大厂三星电子也着手制定人形机器人发展战略,将公司的下一个发展破题点押注在机器人赛道上,高度重视并全力拓展机器人业务。
前有波士顿动力、本田等一众老玩家,后有特斯拉、三星等“新星”,人形机器人浪潮席卷之下,谁能脱颖而出?
人形机器人的昨日、今日和明日
顾名思义,人形机器人一般是指具有与人类类似的身体结构和运动方式(双足行走、双手协作等)的智能机器人,相比聚焦于某一专用领域的工业机器人,人形机器人能够适用于各类现实生活场景,从专用转向通用。因此,人形机器人既需要极强的运动控制能力,也需要具备非常强的感知计算能力。
回顾人形机器人的发展历程,大致能够分为三个阶段:
1928年-1973年,行业还处于初期探索阶段,市场主要由欧美及日本主导。例如美国通用电器制造商西屋电气公司发明的“Televox”、英国W.H.理查兹和飞机工程师艾伦·雷菲尔发明的“埃里克”以及日本生物学家西村诚发明的“学习天生”成为世界上首批人形机器人。此时对人形机器人的相关研究聚焦于人形的结构和驱动,机器人还不具备感知和决策功能。
到了1973年-2013年,人形机器人产业则进入了系统感知阶段,人形机器人在“视觉”和“触觉”方面有了较大的突破,日本本田的人形机器人ASIMO于2000年发布。
此后,产业则走向了决策阶段。人形机器人拥有了更强的自主学习和决策能力,许多为人熟知的产品陆续问世,例如美国波士顿动力的新版Atlas在2017年正式发布,其前身PETMAN人形机器人研发目的是替代人类去测试危险化学环境下的新型防护设备的可靠性。
从当下行业格局来看,电动车企特斯拉以Optimus“擎天柱”引领人形机器人浪潮,科技大厂如OpenAI、微软、谷歌等纷纷入局,推动大模型与机器人的结合。除车企、科技大厂外,纯机器人厂商达闼、优必选也在持续推动人形机器人的研发。
新入局的三星尚未披露其完整的人形机器人商业版图,不过BusinessKorea在相关报道中透露,三星将在10月举办的“三星科技日”上推出一款运用人形机器人技术的医疗机器人。
价格层面,目前人形机器人的成本仍处于高位,如ASIMO和Atlas成本在200万美元水平;WalkerX、CyberOne、Ameca等成本在10万美元的水平。展望远期,特斯拉CEO马斯克表示,人形机器人擎天柱的量产成本预计不到2万美元。
关节为高价值量环节
剖析人形机器人的成本,则需要拆分到各个零部件来看。以特斯拉的Optimus“擎天柱”为例,特斯拉人形机器人主要包括躯干、四肢和手部等结构。特斯拉人形机器人的躯干中集成了电池包模组,且机器人的“大脑”同样位于躯干中;四肢部分主要为28个执行器,分为直线和旋转两类;手部则是采用6个执行器,拥有11个自由度(单手)。
执行器布置方案包括14个直线执行器和14个旋转执行器,分别分布在肩部(3个旋转)两个、大臂(1个直线)两个、小臂(2个直线+1个旋转)两个、腰部(2个旋转)、髋部(2个旋转)两个、大腿(2个直线)两个和小腿(2个直线)两个。
具体零部件有:
旋转执行器方案:电机+谐波减速器+双编码器(位置传感器)+扭矩传感器+轴承;
直线执行器方案:电机+行星滚柱丝杠+编码器(位置传感器)+力传感器+轴承;
灵巧手方案:空心杯电机+蜗轮蜗杆。
从产业链价值量来看,国信证券测算,70%以上的硬件成本来自关节,包括旋转、线性、手部关节,同时硬件端的难点也在于关节。主要涉及的零部件有无框/空心杯电机、谐波/行星减速器、滚珠/滚柱丝杠、力矩/位置传感器、轴承等。
具体到公司层面,据国信证券梳理,主要涉及的公司有:
减速器环节:绿的谐波、双环传动、中大力德;
微电机环节:鸣志电器、江苏雷利、步科股份;
丝杠环节:恒立液压、秦川机床;
伺服环节:汇川技术、雷赛智能、禾川科技;
旋转/线性关节:三花智控、拓普集团。
关键词:
Copyright 2015-2022 艺术头条网 版权所有 备案号:沪ICP备2022005074号-20 联系邮箱:58 55 97 3@qq.com